
Projekt komputera pokładowego – prototyp (podejście pierwsze)

Zespół z klubów SP5WWL oraz SP5YAM od pewnego czasu współpracuje w kolejnych misjach stratosferycznych. Po wielu dyskusjach i zmian założeń Tomek SP5WAB przygotował schemat komputera pokładowego. Jest to pierwsza wersja – prototyp, który chcemy przetestować przy najbliższym locie.
Główne założenia:
– jest to główna płytka – kręgosłup naszych projektów,
– „mózgiem” płytki jest Arduino Nano,
– w łatwy sposób będzie można dokładać kolejne płytki jak przemiennik, SSDV, SSTV live, DIGI i wiele innych,
– obsługa do pięciu urządzeń 1-Wire (np. termometrów choćby DS18B20),
– możliwość podpięcia czujników na I2C,
– podpięcie czujników i zewnętrznych modułów za pomocą złączy JST (standard),
– jako nadajnik do SSTV moduł Dorji818,
– realizacja odcinania przez obsługę serwa na zadanej długości geograficznej,
– komunikacja z przeprogramowaną sondą RS41 przez UART. Sonda dostaje dane z czujników i wysyła w RTTY oraz wysyła kompletną z ramkę, z której jest pobierana jest długość geograficzna (np. 22° 34´ 13´´) na, której realizujemy odcinanie,
– wyjście zasilania 4, 3 V oraz 2, 75 – wartości zasilania wynikają z przeprowadzonych badań. Np. moduł mp3 przy zasilaniu poniżej 3.9 V obcina wierzchołek sinusa sygnału SSTV. Możliwość innych wartości napięcia.
Z góry odpowiedzi na pewne pytania:
Dlaczego na płytce zasilania SSTV?
Dlatego, że w ponad 90 % misji ma w pakiecie SSTV i wtedy nie ma potrzeby powielać płytek. Jeżeli nie będzie przewidziane nie wlutowujemy Dorji i modułu mp3.
Czy będzie można wykorzystać ten projekt?
Tak projekt będzie opublikowany na wolnej licencji dla każdego.
Jakie źródło zasilania jest przewidziane?
Akumulator 18650-30b SAMSUNG lub podobny firmy Sony.
Schemat w formacie pdf do pobrania: 20.00.00-HAB_MB1-1.0-sch
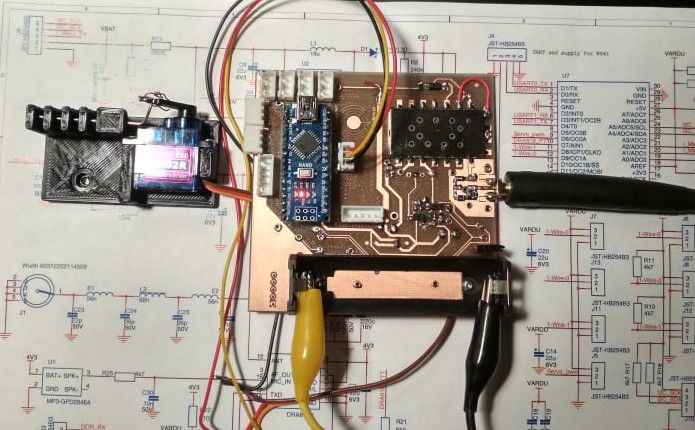
A oto i testy.
Testy na biurku